# livox_laser_simulation_gazebo9_with_sensor_msg_pointcloud2
**Repository Path**: tdcsu/livox_laser_simulation_msg
## Basic Information
- **Project Name**: livox_laser_simulation_gazebo9_with_sensor_msg_pointcloud2
- **Description**: No description available
- **Primary Language**: Unknown
- **License**: Not specified
- **Default Branch**: main
- **Homepage**: None
- **GVP Project**: No
## Statistics
- **Stars**: 0
- **Forks**: 0
- **Created**: 2025-05-21
- **Last Updated**: 2025-05-21
## Categories & Tags
**Categories**: Uncategorized
**Tags**: None
## README
# Introduction
* 解决livox系列雷达在gazebo9仿真环境中无法输出sensor_msgs::PointCloud2和livox_ros_driver/CustomMsg点云问题
* 修复`https://github.com/lvfengchi/livox_laser_simulation`代码中gazebo7和9无法适配问题
# Install
* 安装ode: https://bitbucket.org/odedevs/ode/src/master/
* catkin_make
* 将livox雷达的xacro文件导入到自己机器人中,其中publish_pointcloud_type = 3为发布livox_ros_driver/CustomMsg格式点云
```xml
0 0 0 0 0 0
True
${update_rate}
urobot
livox_base
100
1
${-horizontal_fov/360*M_PI}
${horizontal_fov/360*M_PI}
50
1
${-vertical_fov/360*M_PI}
${vertical_fov/360*M_PI}
${laser_min_range}
${laser_max_range}
0.002
gaussian
${noise_mean}
${noise_stddev}
${visualize}
${samples}
1
package://livox_laser_simulation/scan_mode/avia.csv
${publish_pointcloud_type}
${ros_topic}
true
50
true
"/livox/imu"
/livox/imu
imu_base_link
10.0
0 0 0
0.0026399240948208127
0 0 0
imu_base_link
false
0.05512, 0.02226, -0.0297 0 0 0
```
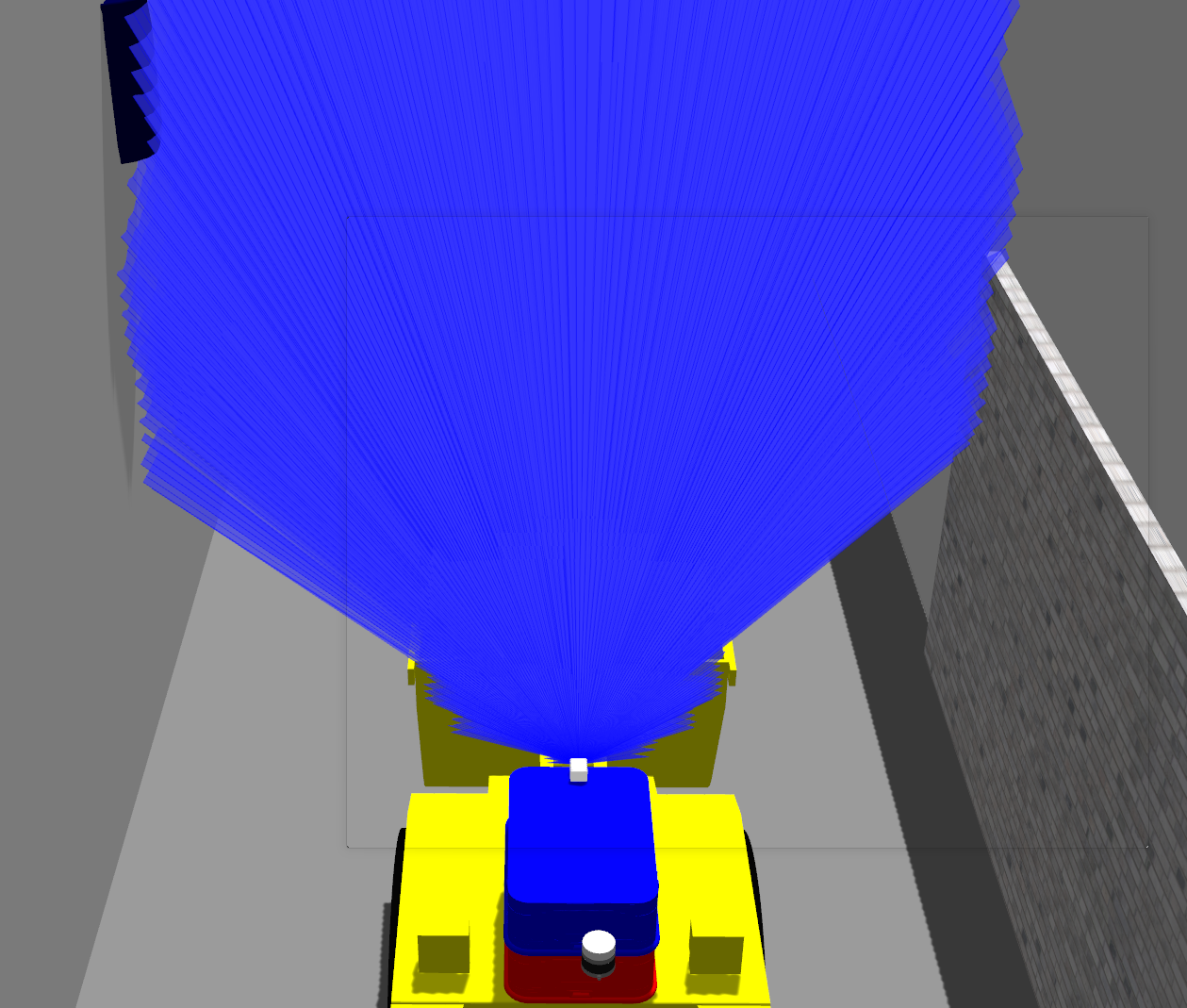
# Result
* 将雷达加入到机器人中
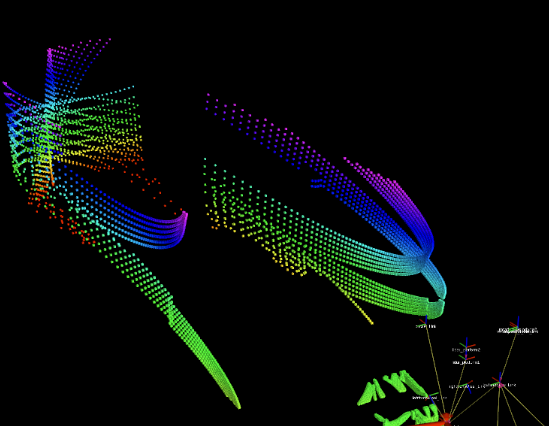
* gazebo仿真